Исполнитель Робот движется по клетчатой поверхности. В систему команд исполнителя входят команды: вверх, вниз, вправо, влево. При выполнении одной команды Робот может перемещаться только на одну клетку.
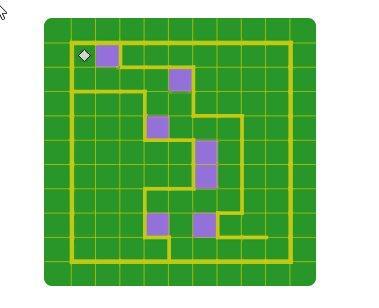
Составьте алгоритм для прохождения лабиринта, ограниченного стенами, из левого верхнего угла поля в правый нижний угол. Закрашенные клетки обозначают препятствия.
Ответ:
Для прохождения лабиринта из левого верхнего угла в правый нижний угол, используя команды вверх, вниз, вправо и влево, можно воспользоваться алгоритмом поиска в глубину (Depth-First Search, DFS). Вот пример простого псевдокода алгоритма на Python:
python
def explore_maze(robot, x, y, visited):
# Проверяем, находится ли робот в пределах лабиринта и клетка не была посещена
if x < 0 or y < 0 or x >= robot.width or y >= robot.height or visited[y][x]:
return False
# Помечаем текущую клетку как посещенную
visited[y][x] = True
# Проверяем, достигли ли мы правого нижнего угла (цели)
if x == robot.width - 1 and y == robot.height - 1:
return True
# Пытаемся двигаться вверх, вниз, вправо и влево
directions = [(0, -1), (0, 1), (1, 0), (-1, 0)]
for dx, dy in directions:
new_x, new_y = x + dx, y + dy
# Проверяем, не выходим ли за границы и не является ли клетка стеной
if 0 <= new_x < robot.width and 0 <= new_y < robot.height and not robot.is_wall(new_x, new_y):
# Рекурсивно исследуем следующую клетку
if explore_maze(robot, new_x, new_y, visited):
# Если удалось достичь цели, возвращаем True
return True
return False
def solve_maze(robot):
# Создаем массив для отслеживания посещенных клеток
visited = [[False for _ in range(robot.width)] for _ in range(robot.height)]
# Начинаем исследование лабиринта с левого верхнего угла
return explore_maze(robot, 0, 0, visited)
Этот алгоритм ищет путь от левого верхнего угла до правого нижнего угла, обходя препятствия. Вы можете настроить условия в функции robot.is_wall(x, y), чтобы проверять наличие стен в лабиринте.
Объяснение: